工作原理:当传感器检测出卷边偏移后输出一个正比于偏移量的直流电压信号,经放大整流后提供给伺服电机,伺服电机驱动皮带轮带动丝杠或球形螺杆,从而控制推杆的伸缩。伺服推动器采用电子限位计算,可直接在系统程序设置所需要的行程,减少了机械限位带来的调节麻烦和故障的困扰。
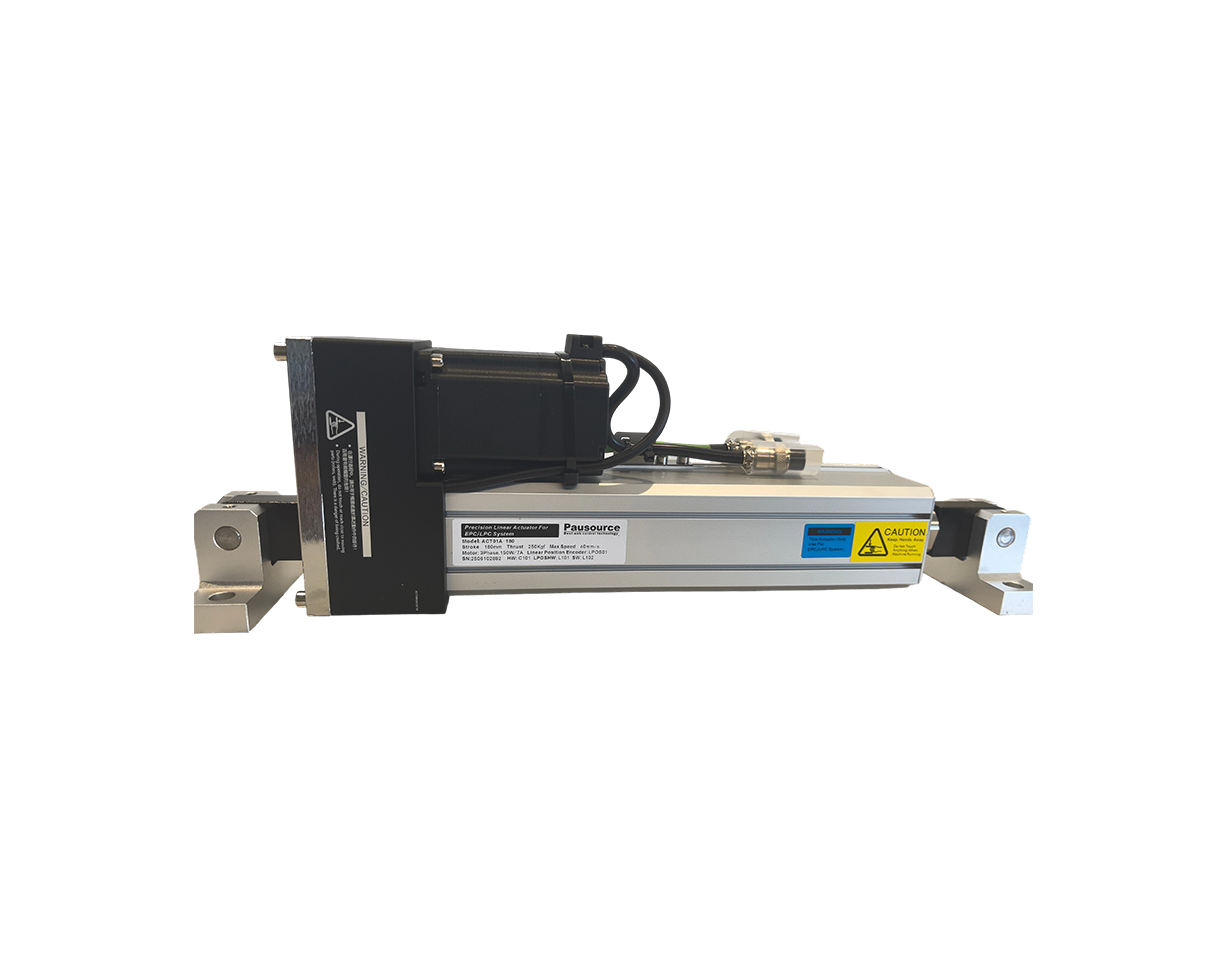
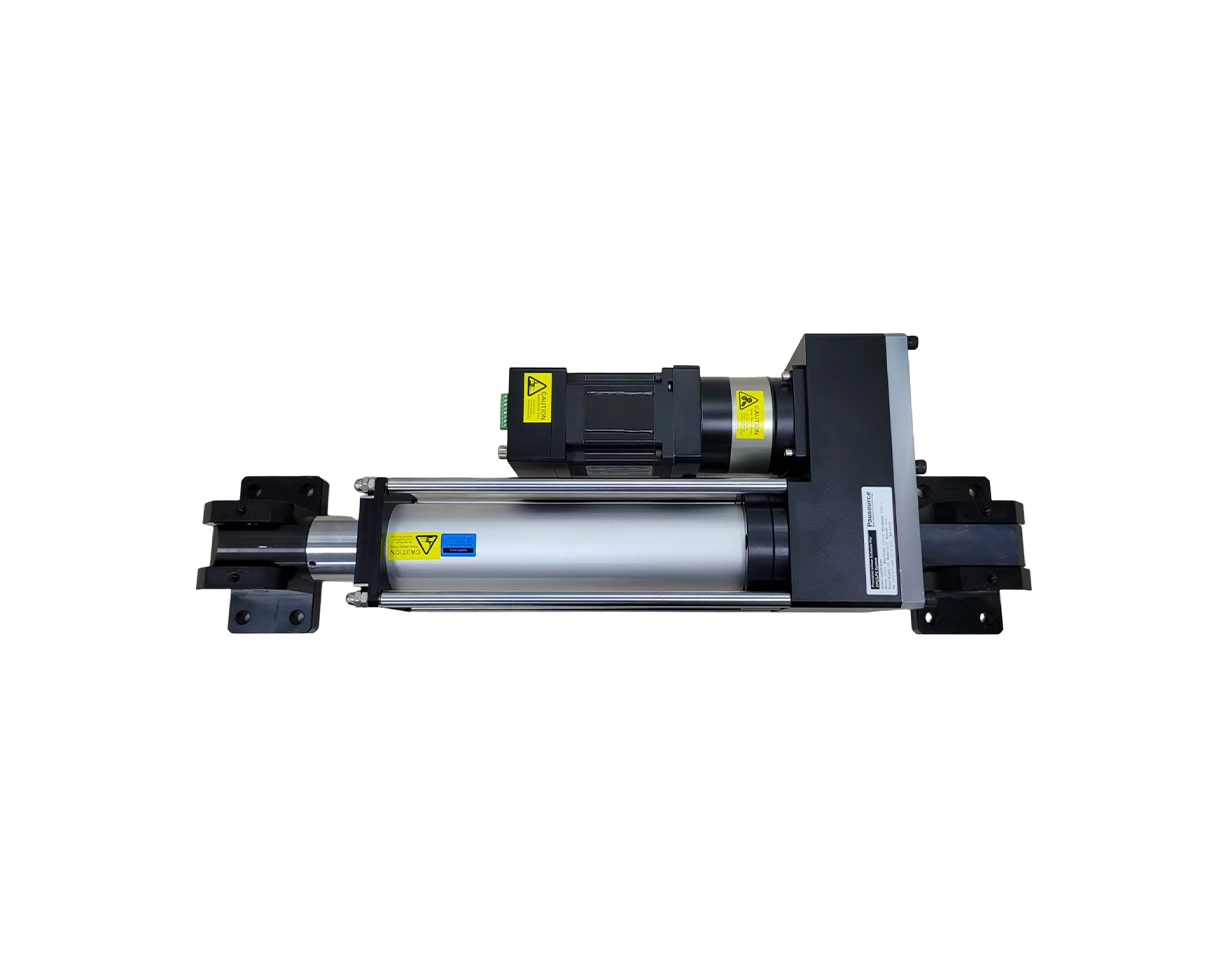
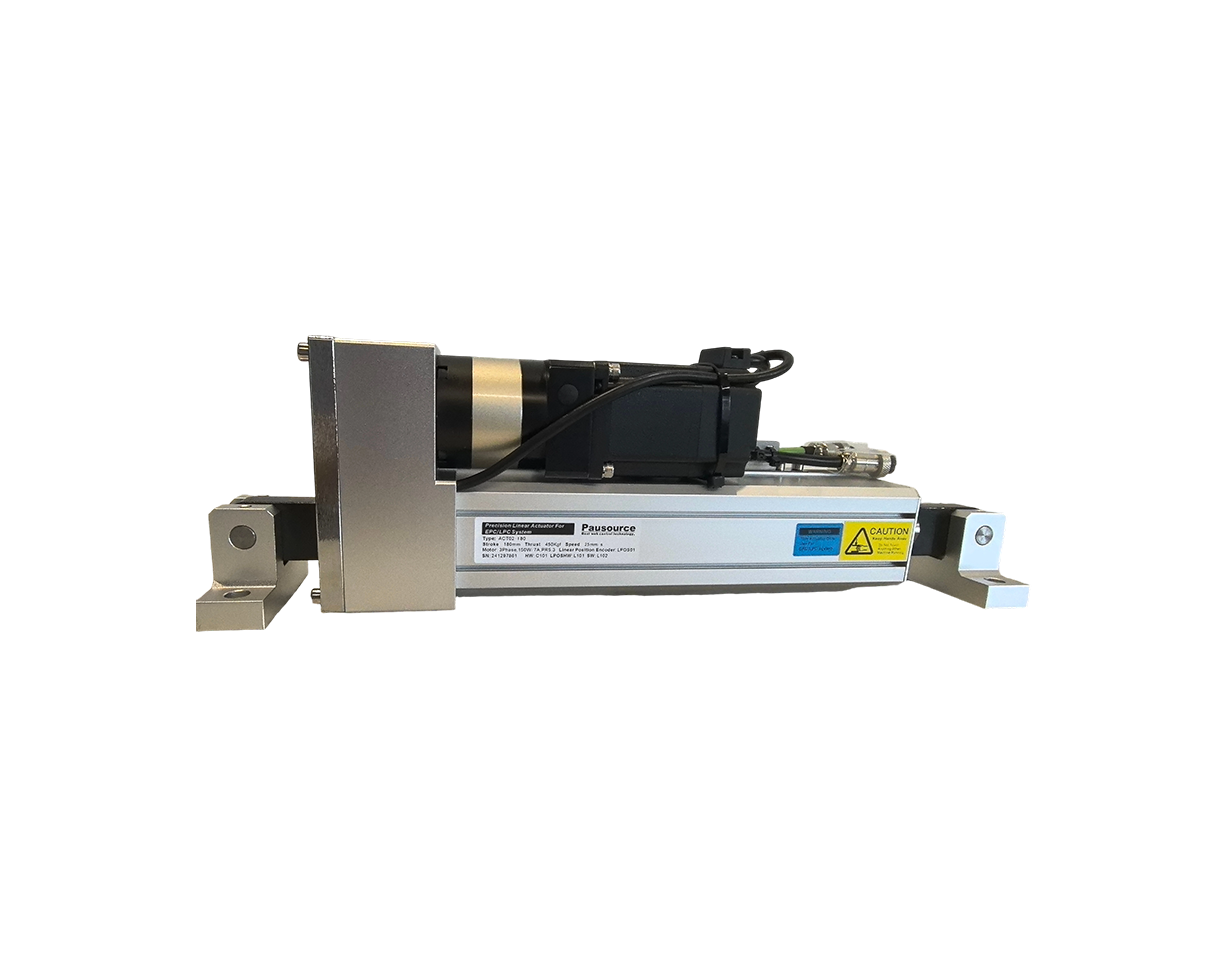
ACT01 伺服驱动器
三相伺服电机,力矩大,无电刷,免维护。
滚珠丝杠,回差小,免维护。
带有绝对值位置反馈,行程自适应。
电子限位,实时反馈驱动位置,无需任何回中开关,限位开关。
无材料自动回中,极限外接报警,功能齐全。
安装方式简单灵活。

Copyright © 2025 苏州普利源智能科技有限公司 版权所有 备案号:苏ICP备2025199328号-1